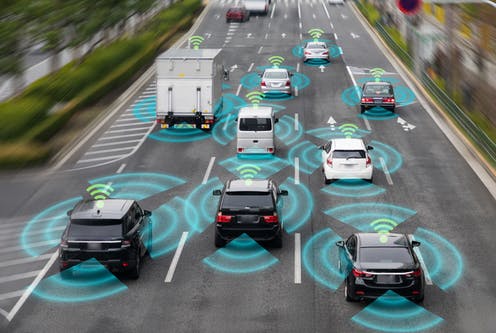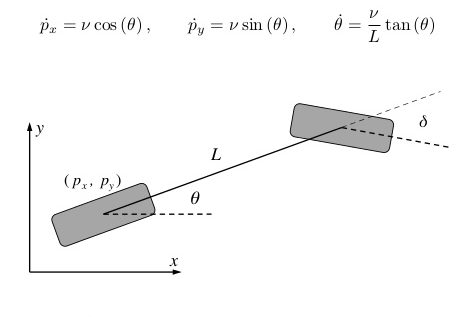
Simple Bicycle Model – How a vehicle moves given a steering angle
Pseudo code with arbitrary values of a Simple Bicycle Model given steering change. The x-axis points to the forward direction or the longitudinal direction The …
Pseudo code with arbitrary values of a Simple Bicycle Model given steering change. The x-axis points to the forward direction or the longitudinal direction The …
Hybrid A* is a function that differs from A* by the fact that it is continuous but isn’t complete, that is, it can’t always find …
MPC is used to optimize control inputs by approximating a reference trajectory using dt, N and T variables in a finite(2-3 seconds) time-horizon. This reference …
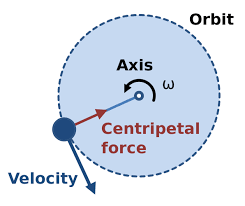
Is a force(tension force to be exact) that makes a body follow a curved path with a center. The force’s direction is always to the …
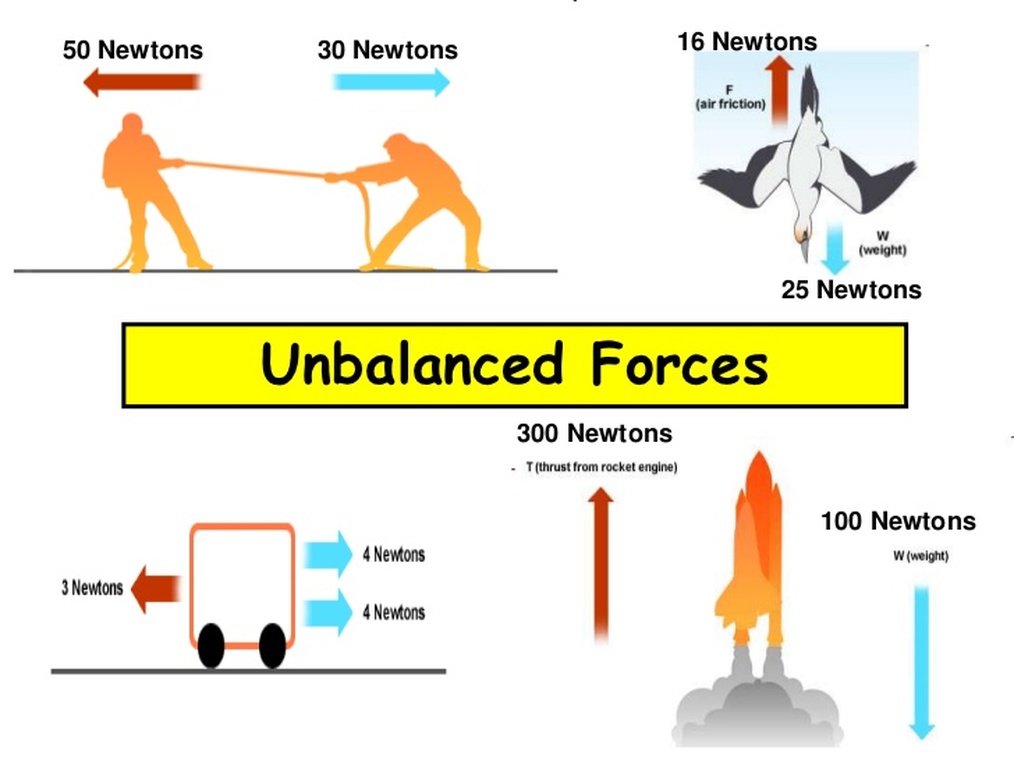
Unbalanced forces create acceleration in the direction of the Net force. Fy = my” Which is the translational acceleration in the y direction Unbalanced moments …
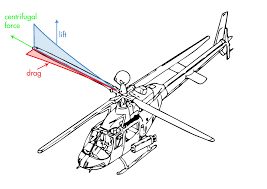
When a rotor spins it produces thrust(F) and also induces moment(M)(torque) both are measured by radians/sec with omega(ω). The moment induced is in the counter …
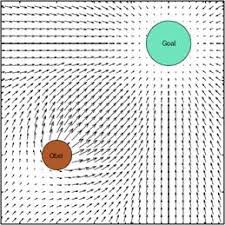
Potential field (represented by a number or tensor, that has a value for each point in space-time) combines attraction to the goal, and repulsion from obstacles in order to plan …
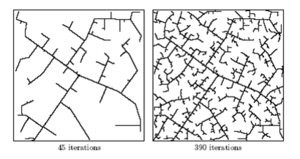
RRT is a searching algorithm applied by building a space filling tree from samples drawn randomly of high-dimensional search spaces . import networkx as nx …
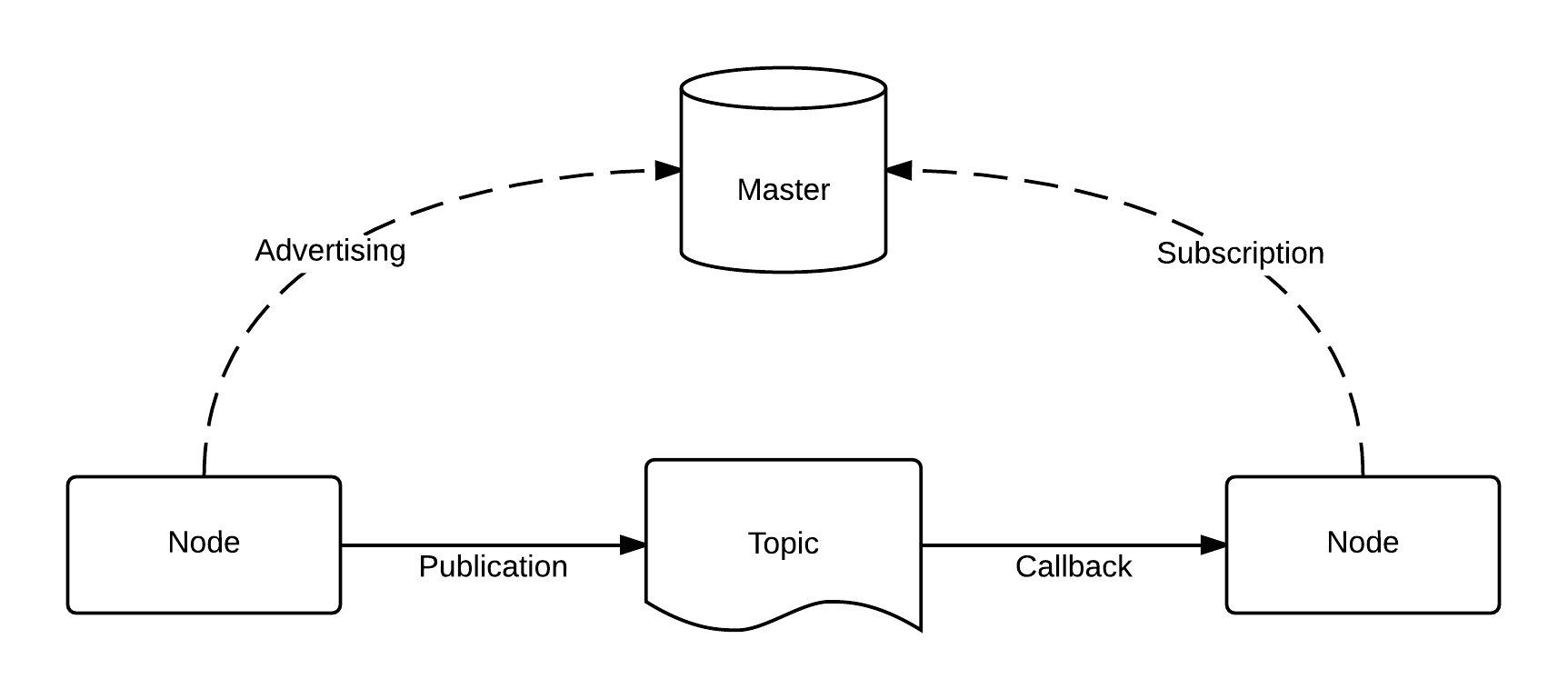
The following two functions should be launched in two separate python threads. They show how easy ROS enables to create a pub/sub relationship for transferring …
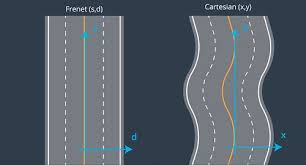
Frenet coordinates are an alternative way to describe a curve in 2D space, this most commonly can be useful while computing displacement of a vehicle’s …