Images as Light Projections
Exposing a sensor to a light – projects points that project to all the sensor – and so all locations on the sensor see light …
Exposing a sensor to a light – projects points that project to all the sensor – and so all locations on the sensor see light …
During inference, precision in floats is not needed and can be reduced to using 8 bits instead of 32 bits this allows to bin continuous …
After training we can optimize a frozen graph or even a dynamic graph by removes training-specific and debug-specific nodes, fusing common operations, and removes code …
In prediction/inference mode, variable types are unnecessary, so by freezing the graph we convert all variables in a graph and checkpoint into constants. Also there …
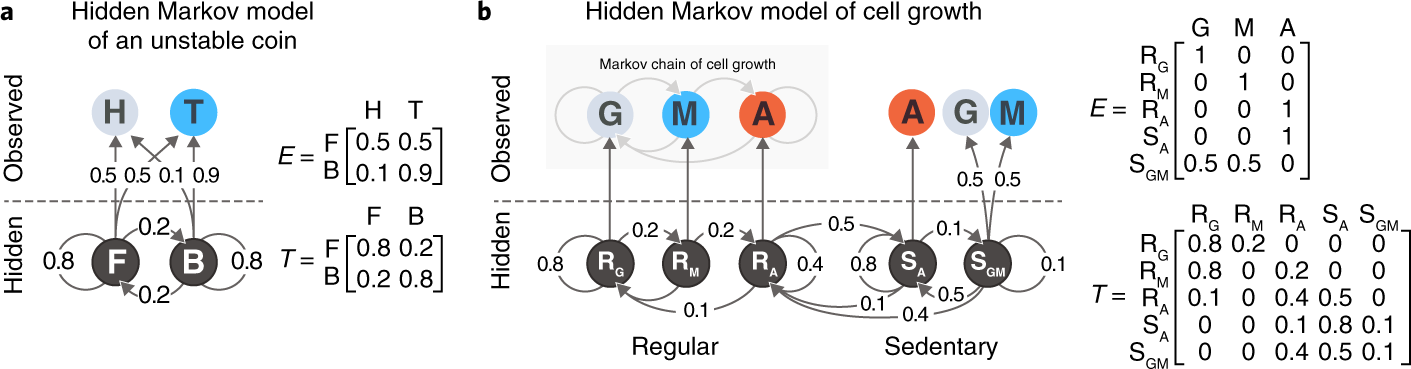
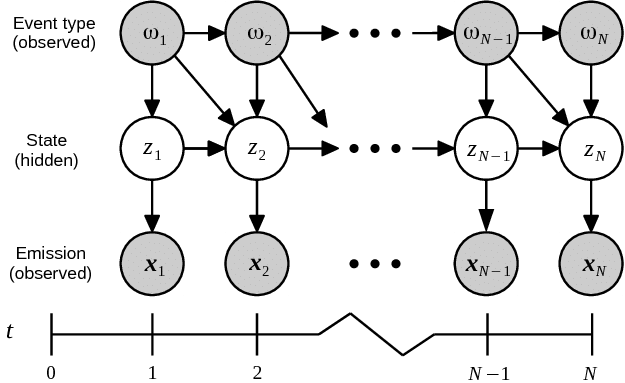
Hidden Markov Model (HMM) is a statistical Markov model in which the system being modeled is assumed to be a Markov process with unobservable (i.e. …
Hidden states are the unknowns we try to detect or predict. The Hidden states have a relationship amongst themselves called the transition probabilities. Observations are …
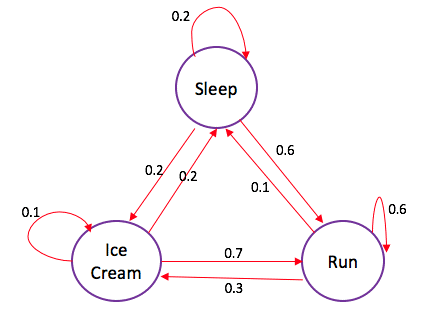
A Markov chain is a stochastic model describing a sequence of possible events in which the probability of each event depends only on the state …
A variational autoencoder provides a probability distribution for describing an observation/attribute in latent/hidden space.
It can not only process single data points (such as images), but also entire sequences of data (such as speech or video). For example, LSTM …
Gradient is a vector that is made up from a the derivatives of multi-variate function. Gradient of an Image = ∇f = [∂f/∂x,∂f/∂y] The gradient …