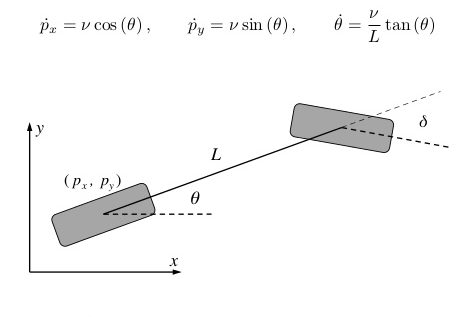
Simple Bicycle Model – How a vehicle moves given a steering angle
2019-12-15
Pseudo code with arbitrary values of a Simple Bicycle Model given steering change. The x-axis points to the forward direction or the longitudinal direction The y-axis, which represents the lateral direction is positive when it points to the right of the driver The z-axis points to the ground satisfying theContinue Reading


 WhatsApp
WhatsApp