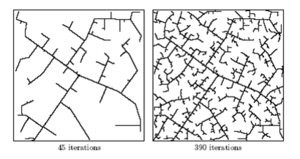
RRT is a searching algorithm applied by building a space filling tree from samples drawn randomly of high-dimensional search spaces .
import networkx as nx
import numpy as np
from sklearn.neighbors import KDTree
class RRT:
def __init__(self,x_init):
self.tree = nx.DiGraph()
self.tree.add_node(x_init)
def nearest_neighbour(x_rand,rrr):
dist=1000
x_rand = np.array(x_rand)
for node in rrt.tree.nodes:
d = np.linalg.norm(x_rand - np.array(node))
if d < dist:
dist = d
vertex = node
return vertex
def rand_conf():
return np.random.uniform(0,100),np.random.uniform(0,100)
def build_rrt(init_configuration, num_vertices_k, delta_distance):
rrt = RRT(init_configuration)
for k in num_vertices_k:
x_rand = rand_conf()
x_near = nearest__neighbour(x_rand,rrt)
x_new = new_conf(x_near,x_rand,delta_distance)
rtt.tree.add_node(x_new)
rrt.tree.add_edge(tuple(x_near),tuple(x_new))
return rrt
rrt = build_rrt((10,10),100,1)
 WhatsApp
WhatsApp
Comments are closed, but trackbacks and pingbacks are open.