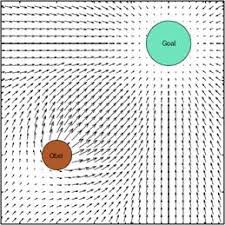
Potential field (represented by a number or tensor, that has a value for each point in space-time) combines attraction to the goal, and repulsion from obstacles in order to plan a path for an autonomous system.
most commonly used attractive potential function is:

where, ε is a positive scaling factor, p(q, qgoal) is the distance between the robot q and the goal qgoal.
The attractive force is given by the negative gradient of the attractive potential:



Ftotal = Fatt(q)+ Frep(q) the autonomous system moves in this field of forces.
Problems
Unintended Collisions
If the autonomous system(robot) is far away from the target, the attractive force will become very great which can lead to collisions with obstacles albeit their repulse.
in order to deal with this a choice between conic and quadratic functions is based by d*goal is the threshold value that defines the distance between the autonomous system(robot) and the goal:

the gradient is:

Goals Non-Reachable with Obstacle near by (GNRON)
To deal with this: when a robot has short distance from the goal we will set the repulse function to 0.

Another issue is when the attractive force and repulsive force are approximately equal on opposite directions:
Thus, the potential force of robot is zero, and will cause the autonomous system to be trapped in local minima or perform oscillations.
 WhatsApp
WhatsApp
Comments are closed, but trackbacks and pingbacks are open.